To engineer readers working in foreign company (not Japan)
I live in Hokkaido, Japan(GMT+9) and am looking for a full remote software development job of overseas which can be done while living in Japan (I’m not searching for Japanese domestic jobs).
I have worked over 20 years as a software engineer.
have bachelor degree of computer science.
can work from December 1st, 2022.
I appreciate you letting me know if you have any opportunities for me.
Please share this post and comment for better reach.
Though currently I’m interested in Prolog and Constraint Logic Programming,
I have many experiences of other technologies and will be glad to take charge in those:
-Mobile apps(Android/iPhone), Google Map API, WebView
-Web App(PHP, JavaScript[Angular.js, Fabric.js, Leaflet.js, jQuery, and more])
-Image Processing(OpenCV)
-databases(MySQL, PostgreSQL, Oracle, Microsoft ACCESS)
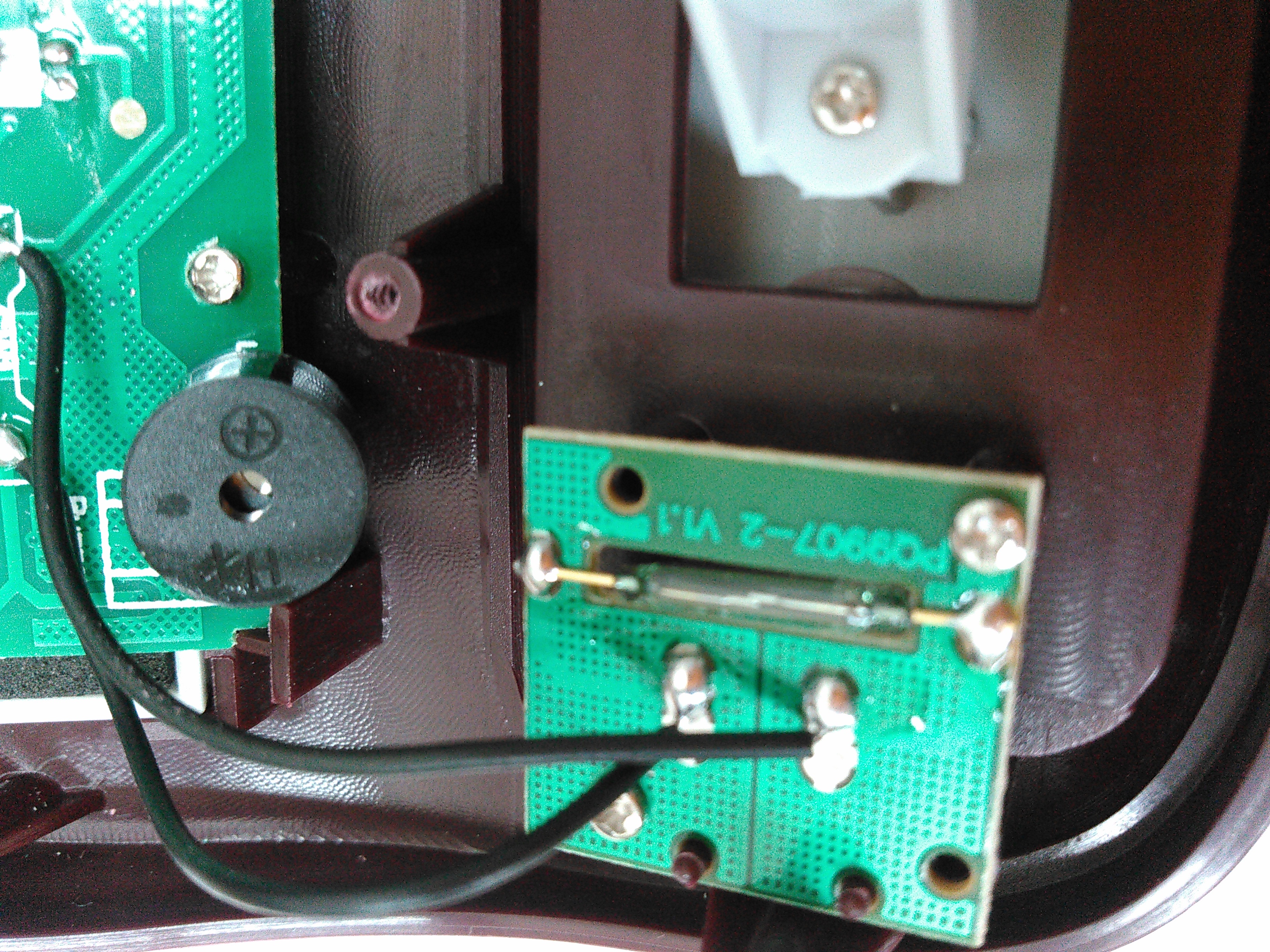
-Embedded Software, Firmware (development of sensor drivers, RTOS)
-Linear Algebra
my resume:
Link
Stack overflow:
Link
Github page(now I’m migrating my blog post’s programs into here):
Link
Project Euler

My skills
Language: C, C++, C#, VB.net, PHP, JavaScript(fabric.js, leaflet.js, Angular.js, jQuery, Ajax), Java, Swift, Prolog, HTML, CSS, VB6, VBA, and VB.net
Database: SQL Server, MS-ACCESS, Oracle, MySQL, PostgreSQL
Technology and other: web programming, database software, embedded software, RTOS, image processing, OpenCV, linear algebra, android/iPhone application, Linux(Ubuntu, CentOS, Raspberry Pi), Google Map API, MFC
Please send me email(koyahata@koyahatataku.com) if you have any opportunities.
Any help will be appreciated.